IMPROVEMENT OF MEDICATION DELIVERY TRICOPTER STABILITY USING ACKERMAN METHOD
Mots-clés :
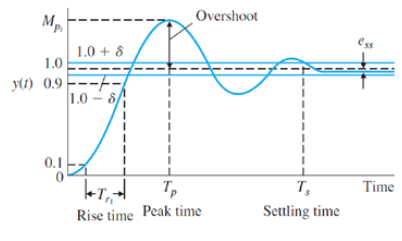
Tricopter, settling time, overshoot and damping factorRésumé
Unmanned aerial vehicles (UAVs) have been a subject of interest across many areas of study. Tricopter is a multirotor with three rotors in Y or T configuration for flight operations; capable of tilting with the aid of a servo motor. The study designed stability controller for a developed medication delivery tricopter to enhanced community-based healthcare system in Nigeria. The study adopted a control law based on Ackerman’s method to improve the tricopter’s settling time, maximum overshoot and damping factor; through a linearized
mathematical model. Desired poles were implemented in MATLAB simulink environment to design a suitable controller for the system in accordance with predefined parameters. The output revealed no overshoots along X and Y axes at settling time of 3s, but overshoot along Z axis by 50% at settling time of 2s. Conclusively, the steady state error was zero and it was observed that the medication delivery tricopter response was made stable with the aid of a controller. The result shows that the tricopter model can be made effectively stable and reliable in operation with the use of a controller
##plugins.themes.default.displayStats.downloads##